Dalam entri terakhir saya, saya membandingkan frekuensi dua referensi frekuensi 10 MHz saya. Satu dari FEI FE-5680A Rubidium Frequency Standard (RFS) dan yang lainnya dari Trimble Thunderbolt GPS Disciplined Oscillator (GPSDO).
Akurasi frekuensi pergeseran RFS dari waktu ke waktu. Pabrikan menentukan penyimpangan kurang dari 2 × 10-9 per tahun, yang untuk referensi 10 MHz adalah 0,02 Hz. Saya tidak memahami mekanisme penyimpangan, tetapi dalam hal apa pun pengimbangan frekuensi RFS ini perlu diukur dan diperbaiki. (Kenapa? Karena aku bisa.)
Akurasi frekuensi GPSDO, di sisi lain, tidak mengikuti waktu. Ini karena orang-orang di U.S. Naval Observatory (USNO) terus memantau dan mengoreksi jam di satelit GPS mereka untuk melacak UTC (USNO). UTC (USNO) secara bergantian melacak waktu Waktu Universal Terkoordinasi (UTC) yang dipertahankan oleh BIPM di Paris.
Di entri terakhir saya, cara saya membandingkan dua frekuensi adalah dengan membandingkan fase dari dua bentuk gelombang pada osiloskop. Dalam perbandingan waktu yang singkat itu, kedua frekuensi itu hampir identik. Kedua bentuk gelombang itu hampir tidak bergerak satu sama lain. Untuk mengukur perbedaan antara dua frekuensi yang hampir identik ini, saya perlu melacak perbedaan fasa dalam periode waktu yang jauh lebih lama. Berikut adalah diagram blok dari rangkaian yang membantu saya melakukan ini:
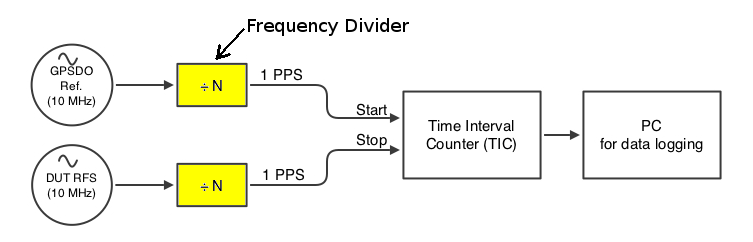
Untuk kenyamanan, kedua referensi 10 MHz pertama-tama diubah menjadi sinyal 1 pulsa per detik (PPS). Satu PPS menggerakkan sinyal “mulai” dari Penghitung Interval Waktu (TIC) dan PPS lainnya menggerakkan sinyal “berhenti” dari TIC yang sama. TIC mengukur interval waktu antara sinyal “mulai” dan “berhenti”. TIC dibangun menggunakan pencacah digital clock pada 50 MHz yang memberikan resolusi 20 ns. Nilai interval kemudian dikirim ke PC untuk pencatatan data. Dan inilah hasilnya:
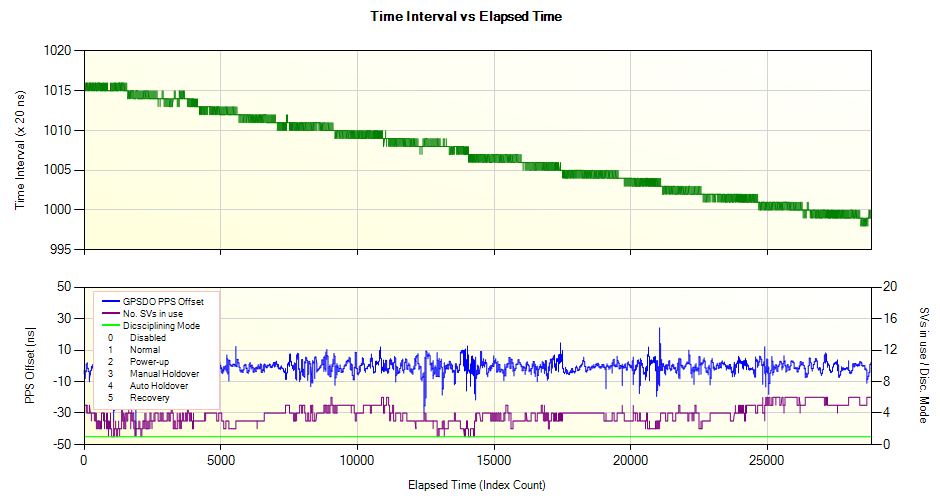
Grafik atas menunjukkan interval waktu yang diukur. Sumbu horizontal adalah waktu yang telah berlalu. Setiap titik sampel sesuai dengan 1 detik. Selama periode 8,3 jam, sinyal PPS dari RFS bergerak sejauh 320 ns. Penyimpangan ini sesuai dengan kesalahan 1,1 × 10-11 atau 0,00011 Hz.
Grafik bawah memplot kinerja swa-monitor GPSDO. Ini menunjukkan bahwa GPSDO berfungsi dengan benar selama durasi percobaan.
Kesalahan frekuensi 0,00011 Hz cukup mengesankan. RFS ini telah dikalibrasi sekitar sebulan yang lalu. Tidak selalu demikian. Ketika saya pertama kali mendapatkan RFS, kesalahan frekuensinya adalah 0,072 Hz. Itu tidak buruk, itu bagus, tapi sekarang mengesankan 🙂
Berikutnya: meningkatkan resolusi penghitung saya. Selain membeli penghitung Stanford Research SR620, saya berencana menambahkan interpolator linier ke penghitung digital saya. Pada dasarnya ini akan menggunakan waktu naik dari rangkaian RC untuk mengukur waktu di antara “tick” counter osilator.